Have you ever wondered how a thermostat regulates the temperature to keep your room comfy? Or how spacecrafts adjust their orientation in the vast emptiness of space using precise bursts of thrusters? These systems might seem sophisticated, but behind the scenes, they often rely on a surprisingly simple principle: bang-bang control.
Bang-bang control is a method that utilizes a binary approach for system regulation by abruptly switching on and off between two states to achieve the target with high efficiency. Unlike more complex control systems with continuous adjustments, bang-bang control embraces simplicity. In this blog post, we'll explore a brief history of the control systems followed by the mechanics of bang-bang control, its real-world applications, and why such a simple strategy plays a critical role in both our everyday lives as well as cutting-edge technologies.

At left, a picture of Boulton & Watt engine from 1788 -- It utilizes a centrifugal governor for automatic control of engine speed -- a foundational concept in control theory, which marked the beginning of automating mechanical processes on a large scale. On the right is a snapshot of the PSLV lift-off -- Control systems play a critical role in space flight. Credit: Science Museum, London; ISRO, India.
The history of control systems is deeply intertwined with the quest for humans to automate processes and improve efficiency. One of the earliest known examples is the water clock, or Clepsydra of Karnak, an ancient Egyptian water clock dating back to ca. 1391-1353 BC. This device was discovered in the Temple of Amen-Re at Karnak and represents one of the oldest physical evidences of automated time measurement. The Clepsydra featured a vessel with 12 carved columns with 11 false holes, representing the hours of the night. Water slowly dripped from a small hole at the bottom. As the water level decreased, it revealed the false holes sequentially, indicating the passage of time. The outflow was regulated by a seated baboon figure, ensuring consistent measurement. This ingenious design allowed for time measurement independent of weather conditions, a significant advancement over sundials, showcasing the ancient Egyptian's ability to create a self-regulating system.
The 18th century proved to be a revolutionary era in control technology with James Watt's invention of the centrifugal governor in 1788. This elegant device introduced the concept of feedback control, a process where a system's output is measured and utilized to adjust its input, creating a self-regulating loop. The governor works by using spinning weights connected to the engine's output shaft. As the engine speed increases, centrifugal force causes the weights to move outward, which in turn closes a valve controlling steam flow to the engine. Conversely, as the engine slows, the weights move inward, opening the valve to allow more steam. This continuous adjustment maintains a consistent engine speed despite varying loads. The centrifugal governor exemplifies negative feedback, where the system's response opposes changes in the output. This principle became the foundation for modern feedback control systems, which are now a cornerstone of modern engineering.
In the 20th century, the advent of digital computers, complex algorithms, predictive modeling, and real-time monitoring has enabled engineers to design systems with exceptional precision. On June 21, 1948, the University of Manchester unveiled the first stored-program electronic computer, marking the beginning of the digital computer age. This breakthrough, coupled with the introduction of programmable logic controllers (PLCs) in the 1960s, transformed industrial automation by replacing complex relay panels with digital programming. The development of Model Predictive Control (MPC) algorithms in the 1970s, pioneered by David Quinn Mayne, enabled the handling of nonlinearities and hard constraints in control systems. By the 1980s, digital control systems were incorporating microprocessors, larger memory capacities, and communication protocols, allowing for real-time monitoring and data analysis. Today, control systems span a broad spectrum of applications. From controlling satellites in orbit to self-driving cars and advanced robotics, control systems have become integral to both cutting-edge technology and everyday life.
Amid these developments, bang-bang control has emerged as a particularly intriguing approach. Despite its simplicity -- alternating between two discrete states -- has proven to be remarkably effective in diverse applications, from space exploration to industrial automation. The simple bang-bang control also happens to be the optimal strategy under a variety of conditions, making it a go-to strategy for a wide range of applications:
-
Optimal control: Bang-bang control often emerges as the optimal solution in minimum-time problems. For instance, when bringing a car to a specific position in the shortest time, the optimal strategy is to apply maximum acceleration until a unique switching point, then maximum braking. It is also an optimal strategy for other situations such as Linear Hamiltonian problems, maximum state-reward problems (about which we do not discuss any further here).
-
Simplicity & robustness: The straightforward nature of bang-bang control makes it easy to implement and understand. It is particularly useful in systems with binary inputs, such as on/off furnaces or simple thermostats.
-
Energy efficiency: In some cases, bang-bang control can be more energy-efficient than continuous control methods. For example, in spacecraft attitude control, using short, precise thruster bursts can conserve fuel compared to continuous adjustments.
-
Performance in continuous control tasks: Recent research has shown that bang-bang controllers, which restrict actions to the extreme values along each dimension, can achieve state-of-the-art performance on several continuous control benchmarks in reinforcement learning. This challenges the conventional assumption that continuous action spaces are always necessary for optimal control.
Bang-bang control is a type of control mechanism used in dynamical systems where the control input can take only two extreme values, such as "on" and "off" or maximum and minimum. The term bang-bang originates from the abrupt switching between these states, which resembles a rapid "bang" between the two extremes. Unlike proportional or PID controllers that provide gradual adjustments by continuously modulating the control input, bang-bang control relies on binary decisions -- either fully engaging or completely disengaging the actuator. This characteristic simplicity leads to its alternative names, such as on-off control or binary control.
In order to achieve a desired target value or setpoint, the bang-bang control mechanism relies on a straightforward binary decision rule -- Measure the error between the system's current state and the desired setpoint and adjust the control input accordingly, which can be summarized as follows:
-
If the system is below the setpoint -- the control input switches to the "on" or maximum state to drive the system upward.
-
If the system is above the setpoint -- the control input switches to the "off" or minimum state to allow the system to decrease.
This process creates a feedback loop where the control input alternates between extremes, causing the system to oscillate around the desired setpoint. Though this oscillation may not achieve perfectly smooth control, it ensures that the system remains within an acceptable range of stability. For example, in the case of a thermostat, when the room temperature drops below the setpoint, the heater turns on; once the temperature exceeds the setpoint, the heater turns off. This simple yet effective mechanism maintains comfort with minimal complexity. Mathematically, the control input (t) can be expressed as:
(t) =
where, and are the maximum control input ("On" state) and the minimum control input ("Off" state), respectively. This approach is particularly effective for systems where simplicity, rapid response, and reliability are more important than precise and smooth control.
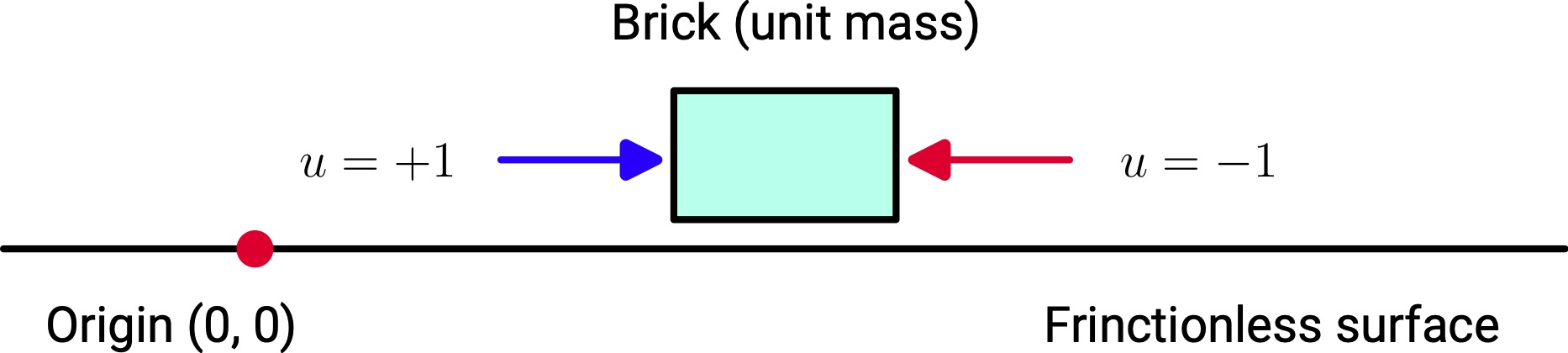
Let's explore an example of a simple mechanical system -- a double integrator -- to illustrate the concept of bang-bang control. Imagine a brick of unit mass sliding on a frictionless surface along the x-axis. Our goal is to bring the brick to rest at the origin , where represents the position and represents the velocity of the brick. To achieve this, we control the brick by applying a horizontal force , which serves as our control input. The magnitude of this force is bounded by , meaning can take any value between its maximum () and minimum () limits. In this scenario, bang-bang control involves switching between these two extreme values to achieve our objective in minimum time. The objective is to use this force efficiently to bring the brick to rest at the origin in minimum time. The minimum time strategy ensures efficient use of the available force while maintaining precise regulation of the system's position and velocity.
The dynamics of the system are governed by the second-order differential equation, Here is the control input (force) and the task is to design a control policy that drives the system from an initial state to the target state in an optimal manner. One intuitive formulation for achieving this task is under minimum-time control, which seeks to minimize the time required to reach the target state. Mathematically, this can be expressed as
This formulation is of particular interest, as we shall see, since it leads to a bang-bang control strategy. In this strategy, the system applies maximum force () in one direction until reaching a critical point (called a switching point), then switches to maximum force () in the opposite direction.
To understand why bang-bang control emerges as optimal, let us solve the governing equation for each extreme value of . When a constant force of is applied,
Eliminating time from these equations gives, where, . Similarly, when a constant force of is applied, the solution is with . The equations above describe parabolic trajectories in the phase space . The constants and define specific regions in this space. The switching curves are given by, and . These curves divide the phase space into regions where the control input must switch from one extreme value to the other. Switching ensures that the system follows an optimal trajectory toward the target state at the origin.
By analyzing these trajectories and switching curves, we can derive the optimal bang-bang control policy. Though we do not show here that this is actually optimal in the shortest time sense, the control input turns out to be,
=
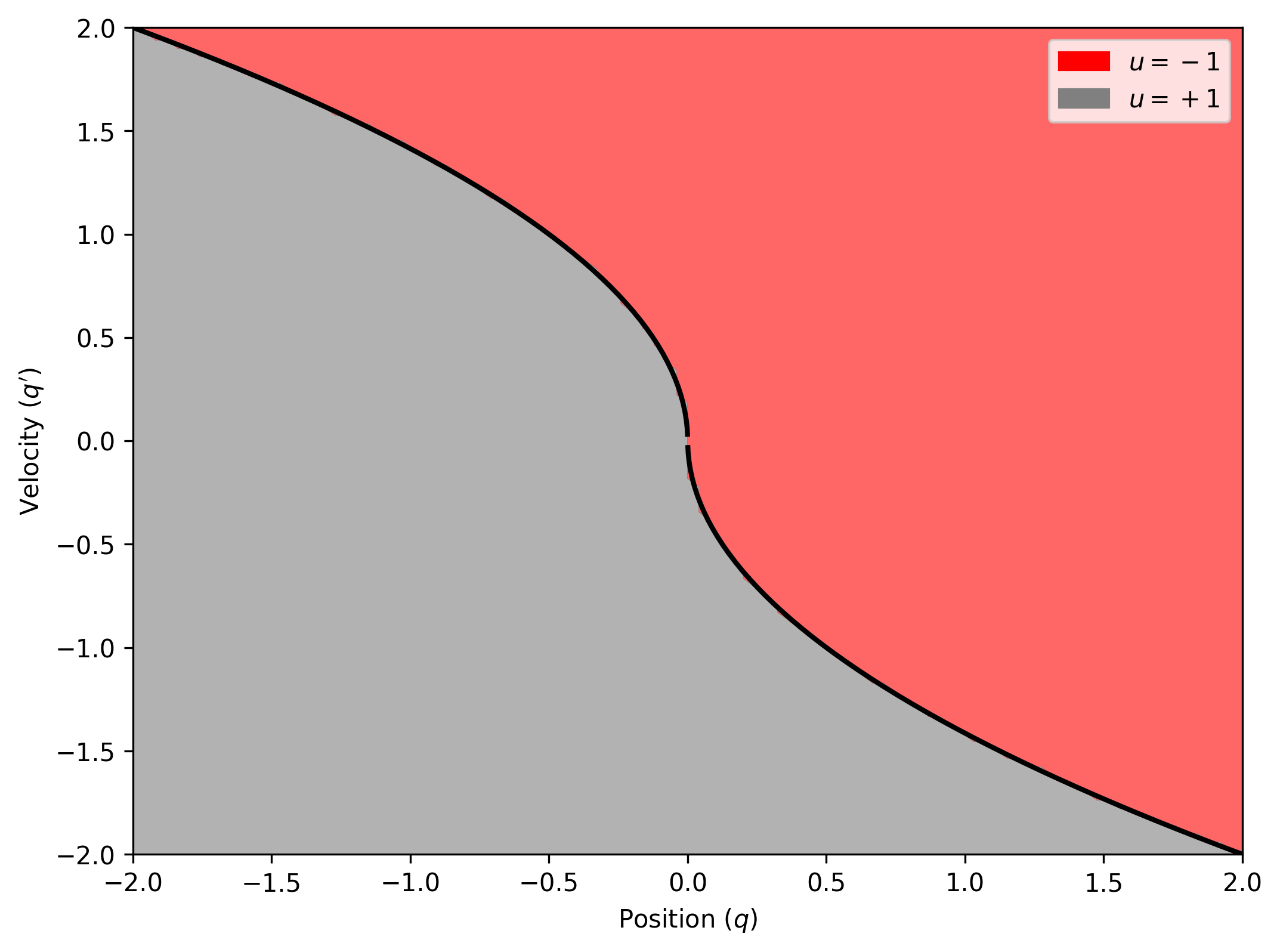
This figure illustrates the optimal bang-bang control policy for the double integrator system, where control input is constrained to . The state space is divided into different regions based on the optimal policy: red regions indicate full braking (u = -1), gray regions indicate full acceleration (u = +1) and black solid lines represent the switching surfaces where control input changes. The switching surfaces define boundaries where the system transitions from accelerating to braking, ensuring minimum-time convergence to the origin.
-
When the brick's velocity is positive and its position lies above the switching curve for , maximum negative force is applied to decelerate it. Conversely, when its velocity is negative and its position lies below the switching curve for , maximum positive force is applied to accelerate it back toward zero.
-
Once both position and velocity reach zero , no further force is applied .
All the the control region scenarios for the double integrator system under bang-bang control are illustrated in the phase space diagram shown in the figure above. When brick's position and velocity lies in red region, maximum negative force is applied to decelerate the system. In contrast, when brick's position and velocity lies in gray region, maximum positive force is applied to accelerate the system towards zero. The switching occurs precisely on the parabolic curves that divide these regions. A detailed derivation and analysis is available here.
In conclusion, bang-bang control is a simple yet useful strategy for a wide variety of systems with minimal memory requirement. By switching between maximum and minimum control inputs, it can ensure convergence to a desired state in a wide variety of systems. This approach, a cornerstone of control theory, has been the go-to approach for several real-world systems like spacecraft thrusters and thermostats, showcasing its practicality and versatility.